

 De
De  Es
Es  Fr
Fr  Pt
Pt 

-
-
-
-
-
-
-
-
-
-
Point Clouds Registration (Stitching)
-
-
-
-
-
-
-
-
-
-
-
-
Point Clouds Registration (Stitching)
Registration (binding, stitching) is a process of mutual orientation of several point clouds.
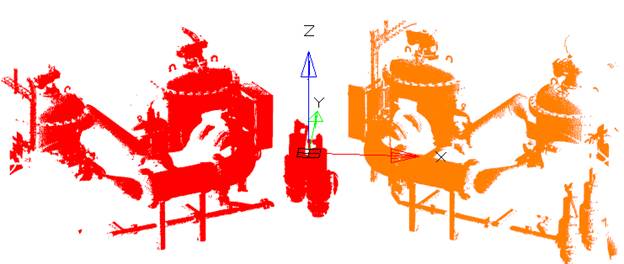
Registration is needed, for example, when one laser scanner scans an object from different positions to get maximal detailed information about object’s geometry. Each scan is made in its own coordinate system, which differs from scan to scan:
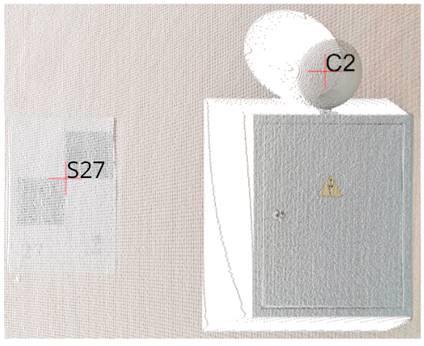
Ordinary, the so-called Marks are used for registration. Marks are objects that can be easily identified in a point cloud. The most popular marks are plane bitonal objects and spherical objects:

We get reference points coordinates for further registration by determining center of every mark in the point cloud.
Reference points that are created by the same scan are merged into the Reference Points Groups (hereinafter just Groups). Each group gets it’s own unique name to distinguish one group from another.
Each reference point in the group also gets unique name. All reference points should have identical names if they were recognized in different scans as the center the same mark. These names allow to match reference points from different groups. Such reference points with the same names in different groups are called relevant points.
Each group should have minimum 3 relevant points to be registered.
After registration we get the conversion (transformation) parameters for each group to a single coordinate system. Usually, one of group’s coordinate system becomes a unified coordinate system for all groups of points. Such a group is called a base group.
After registration coordinates of common reference points are also obtained. Common reference points are coordinates of all reference points after transformation. In this case, the coordinates of the same name points are averaged.
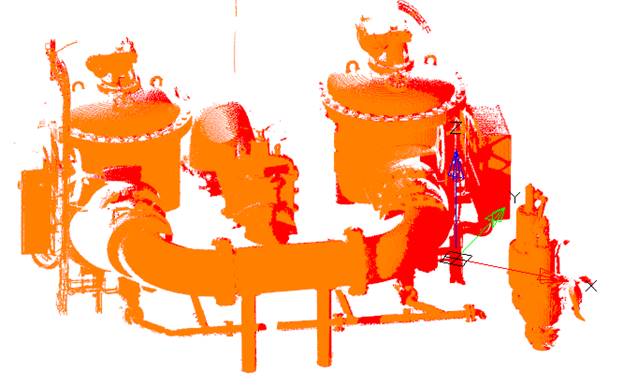
The obtained transformation parameters can be applied to point clouds:
Precision of registration can be increased if you exclude reference points with maximum residual from registration process and then register point clouds again. Residual is a deviation of transformed reference points from common reference points.