De
De  Es
Es  Fr
Fr  Pt
Pt 

-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
Point Cloud
Point Cloud
A point cloud is a large set of points in a three-dimensional coordinate system. In most cases, a point cloud is the result of a 3D scanner proceeding. This device allows you to get an idea of the surface geometry of the scanned object. But nanoCAD also allows you to work with point clouds obtained by any other methods, including photogrammetric ones.
|
|
Note |
|
A Point vector object and a cloud point are represented by different entities. |

In addition to coordinates, a point can contain additional information – metadata (attributes). Some metadata is the result of the scanning process (intensity, color, time, etc.), and some is added to the point when working with the cloud (class, normal, etc.).
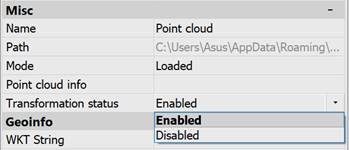
A point cloud is a separate object, some of its properties can be viewed and edited in the Properties bar. In addition to specialized operations, standard editing commands are available for point clouds, such as move, rotate, scale, mirror, align.
Moving, rotating, scaling, flipping, aligning will be blocked if the Transformation status option is disabled.
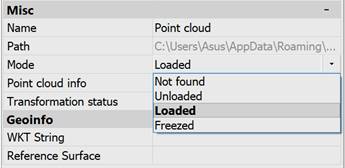
You can also set the point cloud loading mode in the Properties bar.