
 De
De  Es
Es  Fr
Fr  Pt
Pt 

-
-
-
-
-
-
-
-
-
-
-
-
Classification of Upper Noises
-
-
-
-
-
-
-
-
-
Classification of Upper Noises
 Ribbon: 3DScan > Classification > Noises >
Ribbon: 3DScan > Classification > Noises >  Classification of Upper Noises
Classification of Upper Noises
Menu: 3Dscan > Classification >  Classification of Upper Noises
Classification of Upper Noises
Toolbar: Classification 3DScan >  Classification of Upper Noises
Classification of Upper Noises
 Command line: PC_CLS_AIRPOINTS
Command line: PC_CLS_AIRPOINTS
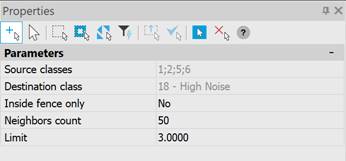
The command classifies points that are higher than the average height of surrounding points.
The command options are set in the Properties bar.
|
Source classes |
Cloud classes that will be used in noise classification. |
|
Destination class |
The class to be assigned to the recognized points. |
|
Inside fence only |
The parameter that allows you to specify a contour or select existing closed polylines within which noise classification will be carried out. Options: Specify closed polyline – specify closed polyline manually, Select closed polylines – select existing closed polylines, No – do not specify polylines, process the entire cloud. |
|
Neighbors count |
The number of nearest neighbors in the vicinity of the point in question, according to which the points will be clustered. The value of this parameter is limited to 2 from below. The higher the value of this parameter, the longer the processing will take. |
|
Limit |
The coefficient by which the dispersion of the heights of points is multiplied, and which is involved in estimating the deviation of the height of the point in question. For the source point, a given number of neighbors is selected in the projection onto the OXY plane (a cylindrical neighborhood is formed). The average value of heights is calculated for neighbors, then the dispersion of heights. If the difference between the height of the source point and the average height value exceeds the Limit value multiplied by the Dispersion, then the point is classified as noise.
|