

 De
De  Es
Es  Fr
Fr  Pt
Pt 

Classification of Lower Noises
 Ribbon: 3Dscan > Classification > Noises >
Ribbon: 3Dscan > Classification > Noises >  Classification of Low Noises
Classification of Low Noises
Menu: 3Dscan > Classification >  Classification of Lower Noises
Classification of Lower Noises
 Toolbar: Classification 3DScan >
Toolbar: Classification 3DScan >  Classification of Lower Noises
Classification of Lower Noises
 Command line: PC_CLS_BELOW_SURFACE
Command line: PC_CLS_BELOW_SURFACE
The command is designed to classify points that fly below the surface.
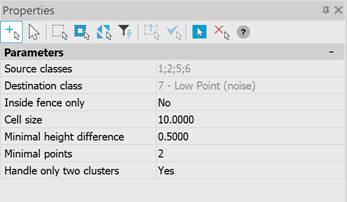
The command options are set in the Properties bar.
|
Source classes |
Cloud classes that will be used in noise classification. |
|
Destination class |
The class to be assigned to the recognized points. |
|
Inside fence only |
The parameter that allows you to specify a contour or select existing closed polylines within which noise classification will be carried out. Options: Specify closed polyline – specify closed polyline manually, Select closed polylines – select existing closed polylines, No – do not specify polylines, process the entire cloud. |
|
Cell size |
The length of the sides of square cells into which the cloud will be divided and within which clustering of points occurs. The value of this parameter is limited to 0 from below. The lower the value of this parameter, the longer the calculation time. Setting this parameter too high can also result in long processing times since a large number of points will be involved in the clustering process. The value of this parameter must be selected based on the width and length of the cloud. |
|
Minimal height difference |
The minimum difference in point heights to form a cluster (sets the neighborhood of the point height for searching the nearest neighbors). The value of this parameter is limited to 0 from below. The higher the value of this parameter, the more points will be captured in the cluster, and accordingly, the longer the processing will take. The too small value for this parameter may result in clusters not being formed. The value of this parameter must be set based on the scatter of heights of cloud points. |
|
Minimal points |
Number of points to form a cluster. The value of this parameter is limited to 2 from below. With large values of this parameter, clusters may not be formed. |
|
Handle only two clusters |
The parameter that provides two ways to process formed clusters – either only two clusters are processed – the parameter value is Yes, or an arbitrary number of clusters – the parameter value is No (see description above). In some cases, processing two clusters is enough, but sometimes processing an arbitrary number of clusters gives better filtering. |
Classified points are marked as lower noise – they are assigned a class with code 7 – Lower point (noise). Points are processed cell by cell (the length of the cell side is set in the Cell Size parameter). To filter noise, clustering based on heights is used – points are combined into clusters based on heights. To form clusters, it is necessary to set the values of two parameters: Minimal height difference – the minimum difference in the heights of points and Minimal points – the minimum number of points to form a cluster.
The command provides two ways to process formed clusters (Handle only two clusters): 1) two clusters are processed – in this case, the entire lower cluster and isolated points will be marked as noise, 2) an arbitrary number of clusters are processed – in this case, the main surface is searched among the clusters, and everything below it is marked as noise.
If there is classified earth in the cloud, the command works according to a different principle – it looks for everything that has fallen underground. It marks erroneous earth points and all points of other classes that are below the ground as noise. For such processing, it is necessary to have a ground class in the Source classes (2 – Earth).