
 De
De  Es
Es  Fr
Fr  Pt
Pt 

-
-
-
-
-
-
-
-
-
-
-
-
False Ground Points Classification
-
-
-
-
-
-
-
-
-
False Ground Points Classification
 Ribbon: 3Dscan > Classification > Noises >
Ribbon: 3Dscan > Classification > Noises >  False Ground Points Classification
False Ground Points Classification
Menu: 3Dscan > Classification >  False Ground Points Classification
False Ground Points Classification
Toolbar: Classification 3DScan >  False Ground Points Classification
False Ground Points Classification
 Command line: PC_CLS_LOW_POINTS
Command line: PC_CLS_LOW_POINTS
The command is designed to classify points flying below ground level.
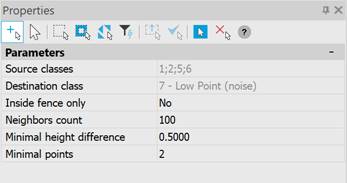
The command options are set in the Properties bar.
|
Source classes |
Cloud classes that will be used in noise classification. |
|
Destination class |
The class to be assigned to the recognized points. |
|
Inside fence only |
The parameter that allows you to specify a contour or select existing closed polylines within which noise classification will be carried out. Options: Specify closed polyline – specify closed polyline manually, Select closed polylines – select existing closed polylines, No – do not specify polylines, process the entire cloud. |
|
Neighbors count |
The number of nearest neighbors in the vicinity of the point in question, according to which the points will be clustered. The value of this parameter is limited to 2 from below. The higher the value of this parameter, the longer the processing will take. |
|
Minimal height difference |
The minimum difference in point heights to form a cluster (sets the neighborhood of the point height for searching the nearest neighbors). The value of this parameter is limited to 0 from below. The higher the value of this parameter, the more points will be captured in the cluster, and accordingly, the longer the processing will take. The too small value for this parameter may result in clusters not being formed. The value of this parameter must be set based on the scatter of heights of cloud points. |
|
Minimal points |
Number of points to form a cluster. The value of this parameter is limited to 2 from below. With large values of this parameter, clusters may not be formed. |
Classified points are marked as lower noise – they are assigned a class with code 7 – Lower point (noise). Points are processed cell by cell (the length of the cell side is set in the Cell Size parameter). To filter noise, clustering based on heights is used – points are combined into clusters based on heights. To form clusters, it is necessary to set the values of two parameters: Minimal height difference – the minimum difference in the heights of points and Minimal points – the minimum number of points to form a cluster.
The command performs clustering for a point and its nearest neighbors and, if the point is below the formed clusters, marks the original point as noise.
The command’s behavior is unified for classified and raw clouds, with and without classified ground.