De
De  Es
Es  Fr
Fr  Pt
Pt 

3D Scanning Terms
Scan
An ordered sequence of points obtained in one step of continuous scanning from one scanner installation site. Scan points are in a single coordinate system.
Scans are transformed into point clouds at the stage of import from external files.
Point Cloud
A set of points in a three-dimensional coordinate system. in most cases a point cloud is a direct or indirect result of a 3D-scanner operation, however, unlike a scan, it does not contain information about the scanning direction.
In addition to coordinates cloud points may carry additional information — metadata (attributes). Some metadata are the result of scanner operation (intensity, color, time, etc.), and some are added to the point in the process of work with the cloud (class, normal, etc.).
Segmentation
Structuring without recognition.
The goal of segmentation is to partition an unstructured points cloud into a non-intersecting subsets of points. All points inside each segment should be close to each other in the selected attribute space.
Segmented subsets of points can be used to build geometry.
A typical segmentation task is the selection of planes in the results of laser scanning. In this case all points inside each segment lie in one plane.
At the level of platform segmentation is realized by named views that contain a cloud fragment obtained by the clipping tools.
Point cloud crop,
Clip
The cropped area, i.e. the visible part of the point cloud obtained by clipping and sectioning commands. Each clip is created only in a specific viewport and does not affect the display of the cloud in other viewports. The existing clip can be cropped again repeatedly. Extended named views retain clouds clipping.
Registration (binding, stitching),
Alignment,
Matching
The process of mutual orientation of several point clouds. As a rule, the need for registration arises when it is necessary to combine the results of several scans.
Marks, Targets
Objects that can be easily identified in a point cloud. They serve to simplify the mutual orientation of clouds in space.
The most common marks are flat, black and white and spherical.



Reference point
The center of a mark in a point cloud.
Each reference point is assigned a name.
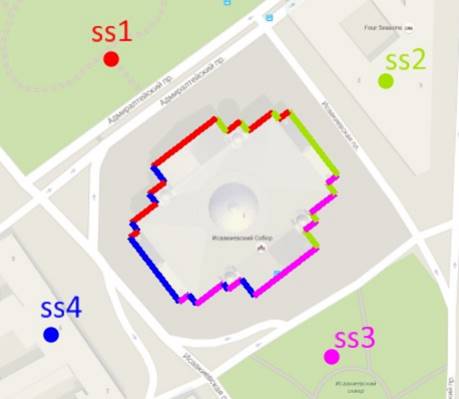
Reference Point Groups (or just Groups)
Groups of reference points belonging to one scan.
To distinguish one group from another, they are assigned unique names.
Base group of reference points
A group of reference points whose coordinate system was taken as the base one for the registration.
Based on the registration results, we obtain the transformation parameters for each group to a single coordinate system. Usually, the coordinate system of one of the groups is taken as the single coordinate system. such group is called a base one.
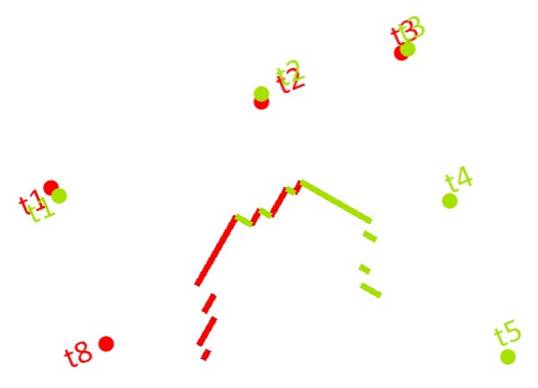
Relevant Reference Points
Same-name reference points in different groups.
All reference points obtained in the course of recognition of one and the same mark on different scans should have the same names. These names allow you to exactly match the reference points from different groups.
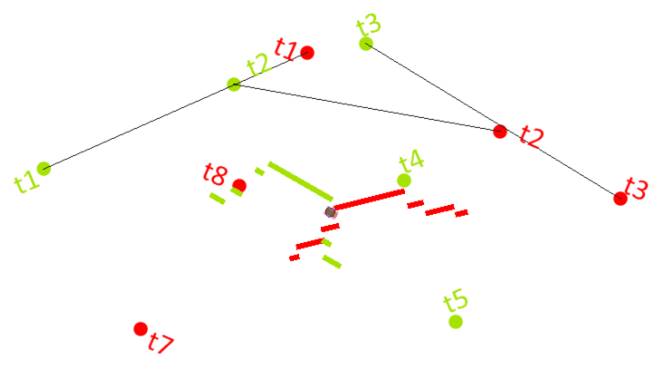
Error, Discrepancy, residual, angular
Deviation of the transformed reference points from common reference point.